WARNING: This documentation covers Elasticsearch 2.x. The 2.x versions of Elasticsearch have passed their EOL dates. If you are running a 2.x version, we strongly advise you to upgrade.
This documentation is no longer maintained and may be removed. For the latest information, see the current Elasticsearch documentation.
The Unit of Scaleedit
In Dynamically Updatable Indices, we explained that a shard is a Lucene index and that an Elasticsearch index is a collection of shards. Your application talks to an index, and Elasticsearch routes your requests to the appropriate shards.
A shard is the unit of scale. The smallest index you can have is one with a single shard. This may be more than sufficient for your needs—a single shard can hold a lot of data—but it limits your ability to scale.
Imagine that our cluster consists of one node, and in our cluster we have one index, which has only one shard:
This setup may be small, but it serves our current needs and is cheap to run.
At the moment we are talking about only primary shards. We discuss replica shards in Replica Shards.
One glorious day, the Internet discovers us, and a single node just can’t keep up with the traffic. We decide to add a second node, as per Figure 49, “An index with one shard has no scale factor”. What happens?
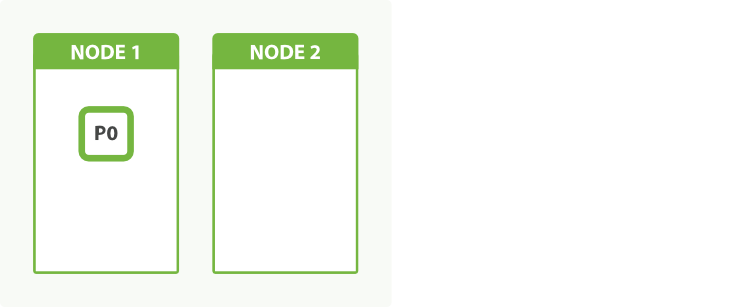
The answer is: nothing. Because we have only one shard, there is nothing to put on the second node. We can’t increase the number of shards in the index, because the number of shards is an important element in the algorithm used to route documents to shards:
shard = hash(routing) % number_of_primary_shards
Our only option now is to reindex our data into a new, bigger index that has more shards, but that will take time that we can ill afford. By planning ahead, we could have avoided this problem completely by overallocating.